Un robot que imita la estructura muscular de un pulpo es el nuevo “juguete” creado por ingenieros de
{kind=link}
Sería el primer robot “invertebrado”, es decir, sin un esqueleto sólido. El proyecto ha sido bautizado como Octopus, y recibe una subvención de
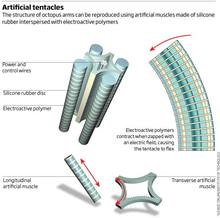
En la revista Bioinspiration and Biomimetics podéis ver el artículo con la descripción del diseño. Para lograr esta flexibilidad se usan anillos de silicona para copiar sus músculos transversales, mientras que para imitar los longitudinales usarán un polímero que reacciona a una corriente eléctrica, gracias a lo cual se podría contraer como el tentáculo de un pulpo.
El gran problema de los robots dirigidos por control remoto bajo el mar es su ineficacia para llegar a recovecos rocosos o a intrincadas formaciones coralinas, por lo que este robot abriría una posibilidad hasta la fecha infranqueable.
A pesar de las buenas intenciones de estos investigadores los expertos de la revista New Scientist, dudan mucho de que realmente se pueda imitar la increíble capacidad de estos animales para sacar el máximo partido a su fenomenal anatomía.
Por el momento, no se ha construido el tentáculo, pero ha desarrollado un simulador mecánico que imita las fuerzas que produce el polímero electro activo. Sin duda, estamos ante un reto apasionante.
Subida por: Imanol
Este proyecto es muy interesante,pero me parece que es irrealizable,o por lo menos muy dificil de realizar,no digo que sea imposible,sino que opino que va a pasar mucho tiempo hasta que sean capaz de crearlo.Aunque ,de lograrlo seria de mucha utilidad en las exploraciones
ResponderEliminar